
Autonomous Mobile Robots in Warehouse Automation: A Comprehensive Review of AI, Navigation, and Sensing Technologies Under Industry 4.0
Article Sidebar
Main Article Content
Abstract
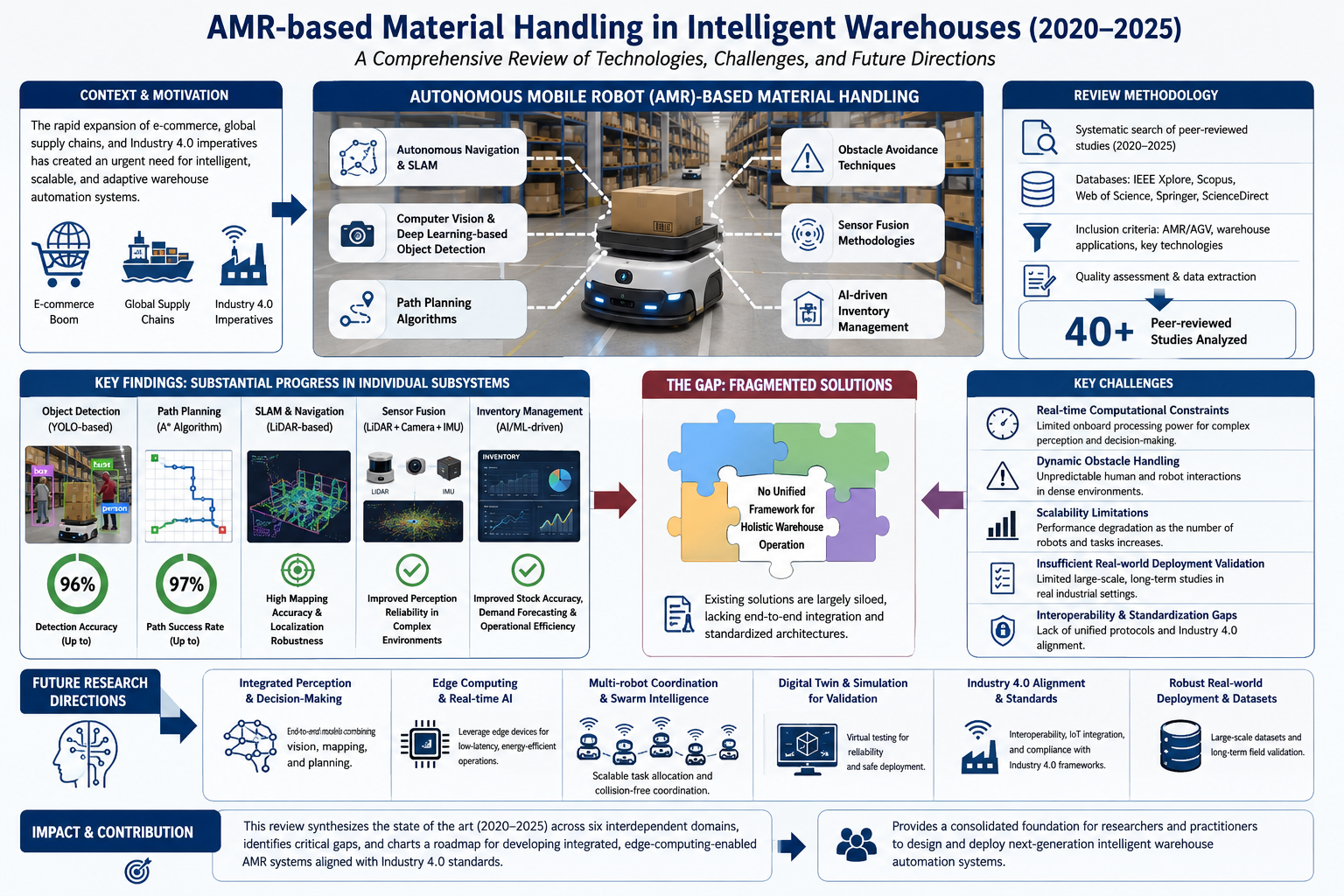
Warehouse automation is becoming increasingly important as the use of e-commerce, global supply chains and Industry 4.0 continues to increase. In order to address this increasing importance, there is a pressing need for scalable, smart and adaptable warehouse automation systems. As such, the purpose of this review is to provide a comprehensive overview of the current state-of-the-art in using Autonomous Mobile Robots (AMRs) for materials handling. The AMR field has grown rapidly since 2020 and the number of peer reviewed articles related to it has increased significantly. Consequently, in addition to the growing interest in this field, we have synthesized 45 or so papers from six interdependent areas of research including; SLAM/autonomous navigation, deep learning/computer vision for object detection, path planning techniques/algorithms, obstacles avoidance techniques/methodologies, sensor fusion methods and artificial intelligence based inventory management. Through our systematic analysis of these papers we identified both significant advancements in each of the various sub-systems included within the AMR system, i.e., YOLO-based object detection was found to be accurate at approximately 96%, A* path planning accuracy was enhanced to 97% and LiDAR-Camera sensor fusion provided a 100% reliable results when testing for objects greater than 2 cm. However, despite the numerous advancements made in the individual sub-systems, existing solutions remain largely fragmented with limited evidence of unified frameworks being developed that support holistically managing warehouse operations. Furthermore, although some authors report success in deploying their solutions in large scale industrial settings, many others identify key challenges they faced including real-time computing constraints, dynamic obstacle handling issues, scalability limitations and inadequate validation of their solutions using data obtained in real world deployments. Therefore, through our analysis of these papers we were able to identify key research gap areas and propose potential future research direction including developing integrated and edge-computing enabled autonomous robot solutions that align with industry 4.0 standards. Our review also provides a consolidated platform for both researchers and practitioners wishing to develop next generation smart warehouse automation solutions.
Article Details
Section

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
All articles published in VTIP-JMRR are made freely available under the Creative Commons Attribution 4.0 International License (CC BY 4.0). Under this license, others may freely share, distribute, and adapt the published work, provided appropriate credit is given to the original authors.
By signing the copyright form, the author(s) warrant and represent that:
✓ The manuscript is original and has not been published previously in any journal, conference, or book (in whole or in part).
✓ The manuscript is not currently under consideration for publication elsewhere.
✓ All authors have read and approved the final manuscript and have agreed to this copyright transfer.
✓ The manuscript does not infringe upon any existing copyright, trademark, patent, or other intellectual property right of any third party.
✓ All data, figures, and tables presented are accurate, authentic, and have not been fabricated or falsified.
✓ Proper permissions have been obtained for any third-party material (images, figures, tables, text) included in the manuscript.
✓ The work complies with all applicable ethical guidelines, including those related to human and animal research.
✓ All sources of funding and conflicts of interest have been disclosed in the manuscript.
How to Cite
References
[1] Wang, S., et al. (2025). AI-based approaches for improving autonomous mobile robot localization in indoor environments: A comprehensive review. Engineering Science and Technology, an International Journal, 63, 101977. https://doi.org/10.1016/j.jestch.2025.101977
[2] Papulová, Z., et al. (2022). Implementation of automation technologies of Industry 4.0 in automotive manufacturing companies. Procedia Computer Science, 200, 1488–1497.
[3] Qiao, J., et al. (2024). Simultaneous localization and mapping (SLAM) based robot localization and navigation algorithm. Journal of Robotics, Springer.
[4] Faseeh, M., et al. (2024). Deep learning assisted real-time object recognition and depth estimation for enhancing emergency response in adaptive environment. Results in Engineering, 24, 103482. https://doi.org/10.1016/j.rineng.2024.103482
[5] Sun, Y., et al. (2024). A multiple environment available path planning based on an improved A* algorithm. International Journal of Computational Intelligence Systems, 17, 172. https://doi.org/10.1007/s44196-024-00571-z
[6] Choi, J. D., et al. (2023). A sensor fusion system with thermal infrared camera and LiDAR for autonomous vehicles and deep learning based object detection. ICT Express. https://doi.org/10.1016/j.icte.2021.12.016
[7] Tagashira, T. (2022). Information effects of warehouse automation on sales in omnichannel retailing. Journal of Retailing and Consumer Services, 66, 102903. https://doi.org/10.1016/j.jretconser.2021.102903
[8] Zhai, C., et al. (2024). The effects of over-reliance on AI dialogue systems on students' cognitive abilities: A systematic review. Education and Information Technologies, Springer.
[9] Attaran, M., & Attaran, S. (2020). Digital technology enablers and their implications for supply chain management. Supply Chain Forum: An International Journal, 21(3). https://doi.org/10.1080/16258312.2020.1751568
[10] Papulová, Z., et al. (2022). Implementation of automation technologies of Industry 4.0 in automotive manufacturing companies. Procedia Computer Science, 200, 1488–1497.
[11] Kaur, A., et al. (2025). Intelligent inventory management: AI-driven solution for the pharmaceutical supply chain. Societal Impacts, 5, 100109. https://doi.org/10.1016/j.socimp.2025.100109
[12] Ellithy, K., et al. (2024). AGV and Industry 4.0 in warehouses: A comprehensive analysis of existing literature and an innovative framework for flexible automation. Springer.
[13] Cimini, C., et al. (2020). Smart logistics and the logistics operator 4.0. IFAC-PapersOnLine, 53(2), 10615–10620.
[14] Tiwari, S. (2023). Smart warehouse: A bibliometric analysis and future research direction. Sustainable Manufacturing and Service Economics, 2, 100014. https://doi.org/10.1016/j.smse.2023.100014
[15] Loganathan, A., et al. (2023). A systematic review on recent advances in autonomous mobile robot navigation. Engineering Science and Technology, an International Journal, 40, 101343. https://doi.org/10.1016/j.jestch.2023.101343
[16] Leong, P. Y., et al. (2024). Exploring autonomous load-carrying mobile robots in indoor settings: A comprehensive review. IEEE Access.
[17] Chai, J., et al. (2021). Deep learning in computer vision: A critical review of emerging techniques and application scenarios. Machine Learning with Applications, 6, 100134.
[18] Abba, S., et al. (2024). Real-time object detection, tracking, and monitoring framework for security surveillance systems. Heliyon, 10(15), e34922. https://doi.org/10.1016/j.heliyon.2024.e34922
[19] Yousif, I., et al. (2025). Leveraging computer vision towards high-efficiency autonomous industrial facilities. Springer.
[20] Liu, L., et al. (2023). Path planning techniques for mobile robots: Review and prospect. Expert Systems with Applications, 227, 120254. https://doi.org/10.1016/j.eswa.2023.120254
[21] Atitallah, A. B., et al. (2024). An effective obstacle detection system using deep learning advantages to aid blind and visually impaired navigation. Ain Shams Engineering Journal, 15(2), 102387. https://doi.org/10.1016/j.asej.2023.102387
[22] Yasin, J. N., et al. (2021). Low-cost ultrasonic based object detection and collision avoidance method for autonomous robots. Springer.
[23] Bergs, L., et al. (2024). Edge computing framework for enhanced robotic adaptability in line-less mobile assembly systems. Procedia CIRP, 119, 26–31.
[24] Groshev, M., et al. (2023). Edge robotics: Are we ready? An experimental evaluation of current vision and future directions. Digital Communications and Networks, 9(1), 166–174. https://doi.org/10.1016/j.dcan.2022.04.032
[25] Müller, L., et al. (2024). Real-time navigation solutions of low-cost off-the-shelf GNSS receivers on board the Astrocast constellation satellites. Advances in Space Research, 73(1), 2–19. https://doi.org/10.1016/j.asr.2023.10.001
[26] Kaur, A., et al. (2025). Intelligent inventory management: AI-driven solution for the pharmaceutical supply chain. Societal Impacts, 5, 100109.
[27] Villegas-Ch, W., et al. (2024). Optimization of inventory management through computer vision and machine learning technologies. Intelligent Systems with Applications, 24, 200438. https://doi.org/10.1016/j.iswa.2024.200438
[28] Shamsuzzoha, A., et al. (2025). A robotic process automation model for order-handling optimization in supply chain management. Supply Chain Analytics, 9, 100102. https://doi.org/10.1016/j.sca.2025.100102
[29] Semeraro, F., et al. (2023). Human–robot collaboration and machine learning: A systematic review of recent research. Robotics and Computer-Integrated Manufacturing, 79, 102432. https://doi.org/10.1016/j.rcim.2022.102432
[30] Rodríguez-Espíndola, O., et al. (2023). Humanitarian logistics optimization models: An investigation of decision-maker involvement and directions to promote implementation. Socio-Economic Planning Sciences, 89, 101669. https://doi.org/10.1016/j.seps.2023.101669
[31] Jahanshahi, H., et al. (2024). Review of machine learning in robotic grasping control in space application. Acta Astronautica, 220, 37–61. https://doi.org/10.1016/j.actaastro.2024.04.012
[32] Giner, J., et al. (2023). A computer vision based approach to reduce system downtimes in an automated high-rack logistics warehouse. Procedia Computer Science, 217, 1078–1083.
[33] Rutinowski, J., et al. (2024). Semi-automated computer vision-based tracking of multiple industrial entities: A framework and dataset creation approach. Springer.
[34] Liu, Y., et al. (2024). The implications of smart logistics policy on corporate performance: Evidence from listed companies in China. Heliyon, 10(17), e36623. https://doi.org/10.1016/j.heliyon.2024.e36623
[35] Fombona, J., et al. (2025). Artificial intelligence and robotics in education: Advances, challenges, and future perspectives. Social Sciences & Humanities Open, 11, 101533. https://doi.org/10.1016/j.ssaho.2025.101533